
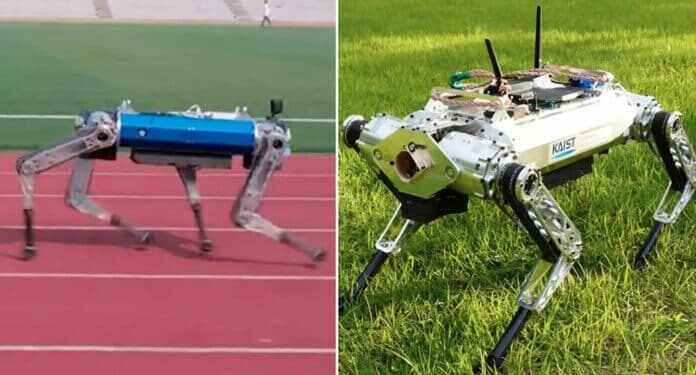
حقق الروبوت ذو الأربع أرجل، HOUND، الذي صممه وصنعه مختبر التحكم والتصميم الديناميكي للروبوت التابع للمعهد الكوري المتقدم للعلوم والتكنولوجيا (KAIST) في كوريا الجنوبية، رقمًا قياسيًا عالميًا في موسوعة غينيس بتسجيله أسرع اندفاعة لمسافة 100 متر على الإطلاق. روبوت رباعي الأرجل.
أظهر HOUND مستوى غير مسبوق من خفة الحركة والسرعة الروبوتية من خلال تحقيق وقت قياسي قدره 19.87 ثانية بمتوسط سرعة 11.26 ميل في الساعة (18.12 كم/ساعة). بدءًا من وضع ثابت، أكمل الروبوت سباقه السريع ووصل إلى طريق مسدود بعد عبور خط النهاية.
وقال يونج ها شين، مصمم HOUND: “تم تحقيق كل هذه الحركات باستخدام وحدة تحكم [محرك] واحدة تم تدريبها على المحاكاة من خلال التعلم المعزز”. “من أجل تجاوز حدود المشغل، تم دمج الخصائص الحركية في المحاكاة لجعل البيئة أقرب ما تكون إلى العالم الحقيقي قدر الإمكان. وفي المحاكاة، يمكن أن تتسارع إلى سرعات أعلى، لكننا لم نختبرها في العالم الحقيقي بعد.
تم تجهيز روبوت HOUND بأقدام خفيفة الوزن مخصصة للركض. يزن حوالي 45 كجم، وهو ما يعادل تقريبًا وزن كلب البلدغ الأمريكي البالغ. يتم تحقيق نطاق الحركة الشامل للروبوت من خلال تكوين وحدات مشغل الورك والركبة بطريقة متوازية، جنبًا إلى جنب مع نظام بكرة الحزام لنقل تشغيل الركبة إلى مفصل الركبة.
تم تصميم الكلب الآلي للتحرك بسرعات عالية ويمكنه الركض بسرعة تصل إلى 3 م / ث (6.7 ميل في الساعة)، والاجتياز فوق العشب، والمشي لمسافات طويلة، وتسلق منحدر 22 درجة، واجتياز عائق يبلغ ارتفاعه 35 سم. تصميمه الميكانيكي الأمثل يجعل كل هذه القدرات ممكنة، وخاصة وحدة التحكم في المحرك وتكوين التروس.
وأوضح يونغ ها شين أن “الأداء الفوري والثابت من الخصائص المهمة عند تحديد محرك للحركة الديناميكية للأرجل”.
مما لا شك فيه أن نطاق حركة وسرعة الكلب الآلي سيستمر في التحسن في المستقبل حيث يواصل منشئوه العمل عليه. إن سباق HOUND الذي حطم الأرقام القياسية هو مجرد البداية، ويمكن للعالم أن يتطلع إلى التقدم في مجال الروبوتات والذكاء الاصطناعي.











{kind=link}